
Organizers: Marwa ElDiwiny, S.M.Hadi Sadati, Laura Blumenschein
Different controversial topics in Soft Robotics, such as future and potential impact, real-world deployment, morphological computation vs. traditional control methods, etc., are frequent subject of debates. General community can benefit from making these debates more formal and publicly available. Debates are 80 minutes long with 4-6 participants and a moderator from recognized experts in the field.
Upcoming Event: TBA
Past Events:
”Special Issue: Leveraging Advancements in Smart Materials Science (an ICRA 2022 Workshop)”

When: Friday, 27 May 2022, 16:20-17:00 (GMT-4)
Where: Workshop Website
Panellists:
Organizers:
Past Events:
”Soft Robotics Impact: Exploratory Research vs. Application Oriented Solutions”
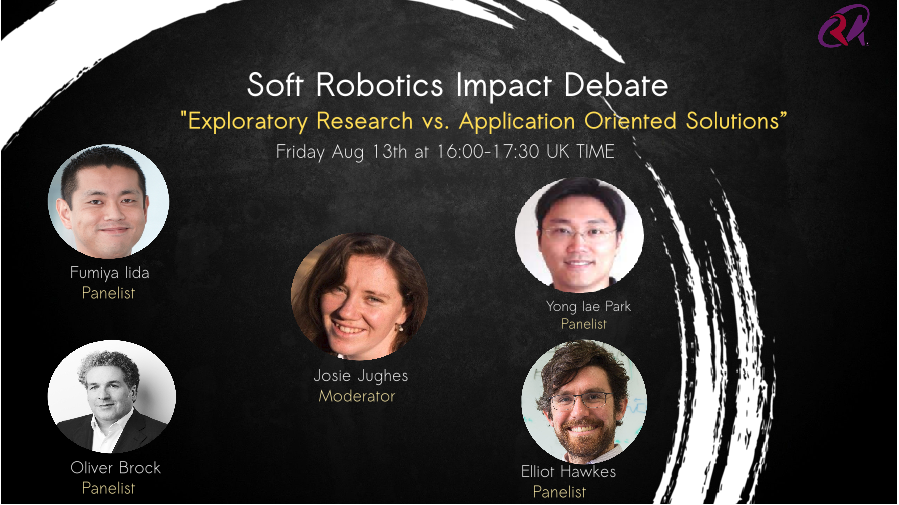
When: Friday, 13 Aug 2021, 16:00-17:30 (UK Time)
Where: IEEE Webex
Event number: 132 814 3758
Event password: RASsoft (7277638 from phones)
Suggest us questions that you think may spark good debate around this topic!
Panellists:
 Elliot Hawkes is an Assistant Professor in the Department of Mechanical Engineering at University of California, Santa Barbara. During 2016-2017. He was on leave as a Visiting Assistant Professor at Stanford University in the lab of Prof. Allison Okamura. Elliot Hawkes’s research focuses on bringing together design, mechanics, and non-traditional materials to advance the vision of robust, adaptable, human-safe robots that can thrive in the uncertain, unstructured world. Current projects involve bio-inspired microstructured adhesive materials, non-linear compliant mechanisms, high-power soft actuators, soft exoskeletons, and growing robots.
Elliot Hawkes is an Assistant Professor in the Department of Mechanical Engineering at University of California, Santa Barbara. During 2016-2017. He was on leave as a Visiting Assistant Professor at Stanford University in the lab of Prof. Allison Okamura. Elliot Hawkes’s research focuses on bringing together design, mechanics, and non-traditional materials to advance the vision of robust, adaptable, human-safe robots that can thrive in the uncertain, unstructured world. Current projects involve bio-inspired microstructured adhesive materials, non-linear compliant mechanisms, high-power soft actuators, soft exoskeletons, and growing robots.
 Fumiya Iida is a Reader in Robotics at the University of Cambridge and the director of the Bio-Inspired Robotics Laboratory. He received his bachelor and master degrees in mechanical engineering at Tokyo University of Science (Japan, 1999), and Dr. sc. nat. in Informatics at University of Zurich (2006). In 2004 and 2005, he was also engaged in biomechanics research of human locomotion at Locomotion Laboratory, University of Jena (Germany). From 2006 to 2009, he worked as a postdoctoral associate at the Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology in USA. In 2006, he was awarded the Fellowship for Prospective Researchers from the Swiss National Science Foundation, and in 2009, he was appointed as a Swiss National Science Foundation Professor for bio-inspired robotics at ETH Zurich. His research interests include biologically inspired robotics, embodied artificial intelligence, and biomechanics, and he has been involved in a number of research projects related to dynamic legged locomotion, navigation of autonomous robots, and human-machine interactions. He has so far published over forty publications in major robotics journals and conferences, and edited two books. Currently he serves on the editorial board of the Soft Robotics Journal, the Journal of Intelligent & Robotic Systems, and as a program committee member for international conferences and workshops. In addition, he has organized a few seminal meetings such as the International Conference of Morphological Computation and International Seminar of Embodied Artificial Intelligence.
Fumiya Iida is a Reader in Robotics at the University of Cambridge and the director of the Bio-Inspired Robotics Laboratory. He received his bachelor and master degrees in mechanical engineering at Tokyo University of Science (Japan, 1999), and Dr. sc. nat. in Informatics at University of Zurich (2006). In 2004 and 2005, he was also engaged in biomechanics research of human locomotion at Locomotion Laboratory, University of Jena (Germany). From 2006 to 2009, he worked as a postdoctoral associate at the Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology in USA. In 2006, he was awarded the Fellowship for Prospective Researchers from the Swiss National Science Foundation, and in 2009, he was appointed as a Swiss National Science Foundation Professor for bio-inspired robotics at ETH Zurich. His research interests include biologically inspired robotics, embodied artificial intelligence, and biomechanics, and he has been involved in a number of research projects related to dynamic legged locomotion, navigation of autonomous robots, and human-machine interactions. He has so far published over forty publications in major robotics journals and conferences, and edited two books. Currently he serves on the editorial board of the Soft Robotics Journal, the Journal of Intelligent & Robotic Systems, and as a program committee member for international conferences and workshops. In addition, he has organized a few seminal meetings such as the International Conference of Morphological Computation and International Seminar of Embodied Artificial Intelligence.
 Oliver Brock is the Alexander-von-Humboldt Professor of Robotics in the School of Electrical Engineering and Computer Science at the Technische Universität Berlin, a German “University of Excellence”. He received his Ph.D. from Stanford University in 2000 and held postdoctoral positions at Rice University and Stanford University. He was an Assistant and Associate Professor in the Department of Computer Science at the University of Massachusetts Amherst before moving back to Berlin in 2009. The research of Brock’s lab, the Robotics and Biology Laboratory, focuses on robot intelligence, mobile manipulation, interactive perception, grasping, manipulation, soft material robotics, interactive machine learning, deep learning, motion generation, and the application of algorithms and concepts from robotics to computational problems in structural molecular biology. Oliver Brock directs the Research Center of Excellence “Science of Intelligence”. He is an IEEE Fellow and was president of the Robotics: Science and Systems Foundation from 2012 until 2019.
Oliver Brock is the Alexander-von-Humboldt Professor of Robotics in the School of Electrical Engineering and Computer Science at the Technische Universität Berlin, a German “University of Excellence”. He received his Ph.D. from Stanford University in 2000 and held postdoctoral positions at Rice University and Stanford University. He was an Assistant and Associate Professor in the Department of Computer Science at the University of Massachusetts Amherst before moving back to Berlin in 2009. The research of Brock’s lab, the Robotics and Biology Laboratory, focuses on robot intelligence, mobile manipulation, interactive perception, grasping, manipulation, soft material robotics, interactive machine learning, deep learning, motion generation, and the application of algorithms and concepts from robotics to computational problems in structural molecular biology. Oliver Brock directs the Research Center of Excellence “Science of Intelligence”. He is an IEEE Fellow and was president of the Robotics: Science and Systems Foundation from 2012 until 2019.
 Yong-Lae Park is an Associate Professor in Robotics at Seoul National University. He has a MSc (2005) and a PhD (2010) in Mechanical Engineering from Stanford University. He has been a Technology Development Fellow at Wyss Institute, Harvard University in 2010-13 and Assistant Professor at Robotics Institute & School of Computer Science, Carnegie Mellon University in 2013-16. His research interests are Soft Robotics, Soft Artificial Skin and Muscle, Stretchable Electronics, Wearable Robotics, Biomedical and Rehabilitation Robotics.
Yong-Lae Park is an Associate Professor in Robotics at Seoul National University. He has a MSc (2005) and a PhD (2010) in Mechanical Engineering from Stanford University. He has been a Technology Development Fellow at Wyss Institute, Harvard University in 2010-13 and Assistant Professor at Robotics Institute & School of Computer Science, Carnegie Mellon University in 2013-16. His research interests are Soft Robotics, Soft Artificial Skin and Muscle, Stretchable Electronics, Wearable Robotics, Biomedical and Rehabilitation Robotics.
Moderator:
 Josie Hughes is a Tenure Track Assistant Professor and the director of the Computational Robot Design & Fabrication Lab at EPFL, Switzerland. She has a PhD in Robotics from the University of Cambridge. She has been a postdoc at MIT CSAIL. Her research interests are Soft Robotics, Robotics Manipulation, and Soft Sensing.
Josie Hughes is a Tenure Track Assistant Professor and the director of the Computational Robot Design & Fabrication Lab at EPFL, Switzerland. She has a PhD in Robotics from the University of Cambridge. She has been a postdoc at MIT CSAIL. Her research interests are Soft Robotics, Robotics Manipulation, and Soft Sensing.
Past Events:
”Bioinspired vs. Biohybrid Design”
When: Monday, 15 Feb 2021, 3-5PM (UK Time)
Where: IEEE Webex (no registration required)
Suggest us questions that you think may spark good debate around this topic!
Bioinspiration, the development of novel materials and structures inspired by biological systems and evolution, has been the essence and main claim of Soft Robotics research. Yet, soft robots are nowhere close to mimicking the life cycle of biological creatures, i.e. growth, adaptation, morphogenesis, and returning to their starting state. Going beyond smart materials, biohybrids may be the solution to multifunctionality and biocompatibility. In this debate, we will bring together experts in Bioinspiration and Biohybrid design to discuss the necessary steps to make more competent soft robots. We will try to answer whether bioinspired research should focus more on developing new bioinspired material and structures or on the integration of living and artificial structures in biohybrid designs.
Panellists:
 Cecilia Laschi is Professor at the National University of Singapore. Her research interests are in biorobotics and especially in soft robotics, that she pioneered and contributed to develop at international level. She received a Ph.D. in Robotics. She was JSPS visiting researcher at Waseda University in Tokyo. She has been Professor at the BioRobotics Institute of Scuola Superiore Sant’Anna in Pisa, Italy, currently on leave. She is Senior member of IEEE, RAS AdCom member, co-chair of the TC on Soft Robotics and founder of the RoboSoft conference.
Cecilia Laschi is Professor at the National University of Singapore. Her research interests are in biorobotics and especially in soft robotics, that she pioneered and contributed to develop at international level. She received a Ph.D. in Robotics. She was JSPS visiting researcher at Waseda University in Tokyo. She has been Professor at the BioRobotics Institute of Scuola Superiore Sant’Anna in Pisa, Italy, currently on leave. She is Senior member of IEEE, RAS AdCom member, co-chair of the TC on Soft Robotics and founder of the RoboSoft conference.
 Prof. Metin Sitti is the director of the Physical Intelligence Department at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany since 2014. As his current ancillary academic positions, he is a professor at ETH Zurich, Switzerland, professor in Koç University, Turkey, and honorary professor in University of Stuttgart, Germany. He has pioneered many research areas, including wireless miniature medical soft robots, gecko-inspired microfiber adhesives, bio-inspired miniature robots, and physical intelligence. He is the editor-in-chief of both Progress in Biomedical Engineering and Journal of Micro-Bio Robotics journals, and an associate editor for both Science Advances and Extreme Mechanics Letters journals. He is an IEEE Fellow.
Prof. Metin Sitti is the director of the Physical Intelligence Department at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany since 2014. As his current ancillary academic positions, he is a professor at ETH Zurich, Switzerland, professor in Koç University, Turkey, and honorary professor in University of Stuttgart, Germany. He has pioneered many research areas, including wireless miniature medical soft robots, gecko-inspired microfiber adhesives, bio-inspired miniature robots, and physical intelligence. He is the editor-in-chief of both Progress in Biomedical Engineering and Journal of Micro-Bio Robotics journals, and an associate editor for both Science Advances and Extreme Mechanics Letters journals. He is an IEEE Fellow.
 Ritu Raman, Ph.D., is an engineer with a passion for biohybrid design: building machines powered by biological materials that work with the human body to fight disease and damage. She has led several initiatives to introduce the next generation to this emerging discipline, including authoring a general audience book titled Biofabrication (MIT Press, Fall 2021). Ritu is currently a postdoctoral fellow advised by Prof. Robert Langer at the Massachusetts Institute of Technology, funded by a L’Oréal USA Women in Science Fellowship and NASEM Ford Foundation Fellowship. She received her B.S. magna cum laude from Cornell University and her Ph.D. from the University of Illinois at Urbana-Champaign as an NSF Fellow. She holds many awards for scientific innovation, including being named a Kavli Fellow by the National Academy of Science and being named to the MIT Technology Review 35 Innovators Under 35 and Forbes 30 Under 30: Science lists. Ritu grew up in India, Kenya, and the United States where she learned to appreciate and thrive in diverse and dynamic environments. She is passionate about increasing diversity in STEM and has championed many initiatives to empower women in science, including being named a AAAS IF/THEN ambassador and founding the Women in Innovation and STEM Database at MIT (WISDM). Website: RituRaman.com | Twitter: @DrRituRaman | Instagram: @ritu.raman.
Ritu Raman, Ph.D., is an engineer with a passion for biohybrid design: building machines powered by biological materials that work with the human body to fight disease and damage. She has led several initiatives to introduce the next generation to this emerging discipline, including authoring a general audience book titled Biofabrication (MIT Press, Fall 2021). Ritu is currently a postdoctoral fellow advised by Prof. Robert Langer at the Massachusetts Institute of Technology, funded by a L’Oréal USA Women in Science Fellowship and NASEM Ford Foundation Fellowship. She received her B.S. magna cum laude from Cornell University and her Ph.D. from the University of Illinois at Urbana-Champaign as an NSF Fellow. She holds many awards for scientific innovation, including being named a Kavli Fellow by the National Academy of Science and being named to the MIT Technology Review 35 Innovators Under 35 and Forbes 30 Under 30: Science lists. Ritu grew up in India, Kenya, and the United States where she learned to appreciate and thrive in diverse and dynamic environments. She is passionate about increasing diversity in STEM and has championed many initiatives to empower women in science, including being named a AAAS IF/THEN ambassador and founding the Women in Innovation and STEM Database at MIT (WISDM). Website: RituRaman.com | Twitter: @DrRituRaman | Instagram: @ritu.raman.

Dr. Talia Moore is an Assistant Professor of Mechanical Engineering at the University of Michigan, where she is also affiliated with the Robotics Institute, the Department of Ecology and Evolutionary Biology, and the Museum of Zoology. She examines the biomechanics, evolution, and ecology of animals to create bio-inspired robotic systems and uses these physical models to evaluate biological hypotheses.
Moderator:
 Dr. Sam Kriegman is a Postdoctoral Associate at the University of Vermont. His research focuses on the AI-driven automated design of robots and biological machines. This involves the dynamical simulation of soft body systems, simulation-to-reality transfer of physical artifacts, and designing the form of functional systems that have limited neural control or none at all. This research serves an external social need: the creation of autonomous adaptive machines that can safely perform useful work. However, these auto-design tools, and the devices they produce in pursuit of social utility, can also be used as scientific instruments to expose the difficult-to-interrogate mechanisms supportive of complex living systems.
Dr. Sam Kriegman is a Postdoctoral Associate at the University of Vermont. His research focuses on the AI-driven automated design of robots and biological machines. This involves the dynamical simulation of soft body systems, simulation-to-reality transfer of physical artifacts, and designing the form of functional systems that have limited neural control or none at all. This research serves an external social need: the creation of autonomous adaptive machines that can safely perform useful work. However, these auto-design tools, and the devices they produce in pursuit of social utility, can also be used as scientific instruments to expose the difficult-to-interrogate mechanisms supportive of complex living systems.
Past Events:
”Bridging the Gap Between Soft Robots and Soft Materials: Discovering New Material Functionalities vs. Creating Architected Compliance”
When: Thursday, Oct 15, 2020 3:00 pm CEST
Where: IEEE Webex (no registration required)
Suggest us questions that you think may spark good debate around this topic
Materials science research into compliant materials is well established, yet a gap still exists between cutting edge materials and implemented soft robots. In this debate, we will bring together experts in the fields of soft materials and soft robotics to discuss the necessary steps to bring more collaboration between these two fields. We will try to answer whether material development should focus on developing new functionalities for soft robots or on creating optimized materials to meet existing needs, allowing for easier rapid prototyping and technology transferability.
Panellists:
 Dr. Jeffrey I. Lipton is an assistant professor at the University of Washington in the Mechanical Engineering Department with a courtesy appointment in the Paul G. Allan School of Computer Science and Engineering. He uses robotics to expand the set of programable material properties and uses programmable materials to enhance the capabilities of robots. He was previously a Post-Doctoral Associate at the MIT’s CSAIL in the Distributed Robotics Lab under Daniela Rus. He received his BS in Applied and Engineering Physics and PhD in Mechanical Engineering from Cornell. His Ph.D. work was under Hod Lipson in the Creative Machines Lab. His past work on 3D printed foods and 3D printing for the hospitality industry has influenced two of the largest 3D printing companies in America and garnered media attention from the New York Times, BBC, and others. He was the lead developer for the Fab@Home project which supported life science and food science researchers’ 3D printing needs on all six habitable continents.
Dr. Jeffrey I. Lipton is an assistant professor at the University of Washington in the Mechanical Engineering Department with a courtesy appointment in the Paul G. Allan School of Computer Science and Engineering. He uses robotics to expand the set of programable material properties and uses programmable materials to enhance the capabilities of robots. He was previously a Post-Doctoral Associate at the MIT’s CSAIL in the Distributed Robotics Lab under Daniela Rus. He received his BS in Applied and Engineering Physics and PhD in Mechanical Engineering from Cornell. His Ph.D. work was under Hod Lipson in the Creative Machines Lab. His past work on 3D printed foods and 3D printing for the hospitality industry has influenced two of the largest 3D printing companies in America and garnered media attention from the New York Times, BBC, and others. He was the lead developer for the Fab@Home project which supported life science and food science researchers’ 3D printing needs on all six habitable continents.
 Dr. Shingo Maeda is currently an associate professor at Shibaura Institute of Technology, Tokyo, Japan. He received in applied physics from Waseda University, Tokyo, Japan in 2008. He spent three years as an assistant professor at Waseda University. He moved to Shibaura Institute of Technology to found the Smart Materials Laboratory in 2011. He was a visiting professor at Scuola Superiore Sant’Anna (Prof. Cecilia Laschi) from 2015 to 2016. His current research topics include active matter, smart gels, soft actuators, chemo-mechanical system and ElectroHydroDynamics.
Dr. Shingo Maeda is currently an associate professor at Shibaura Institute of Technology, Tokyo, Japan. He received in applied physics from Waseda University, Tokyo, Japan in 2008. He spent three years as an assistant professor at Waseda University. He moved to Shibaura Institute of Technology to found the Smart Materials Laboratory in 2011. He was a visiting professor at Scuola Superiore Sant’Anna (Prof. Cecilia Laschi) from 2015 to 2016. His current research topics include active matter, smart gels, soft actuators, chemo-mechanical system and ElectroHydroDynamics.
 Prof. Jonathan Rossiter is a Professor of Robotics and head of the Soft Robotics group at Bristol Robotics Laboratory. In his robotic actuator and artificial muscle research he has been developing new polymer-composite actuators involving principles of buckling and bi-stability and robots which are inspired by bio-mimetic study of swimming organisms, including bacteria and fish. His research also include bio-mimetics, artificial intelligence, composites, sensors and the wider robotics field. Bio-mimetics is an engineering tool that covers a huge scale from the tangible nano-technology level, including materials, actuators and sensors, right up to the intangible level of artificial intelligence, including high-level perception, cognition and reasoning.
Prof. Jonathan Rossiter is a Professor of Robotics and head of the Soft Robotics group at Bristol Robotics Laboratory. In his robotic actuator and artificial muscle research he has been developing new polymer-composite actuators involving principles of buckling and bi-stability and robots which are inspired by bio-mimetic study of swimming organisms, including bacteria and fish. His research also include bio-mimetics, artificial intelligence, composites, sensors and the wider robotics field. Bio-mimetics is an engineering tool that covers a huge scale from the tangible nano-technology level, including materials, actuators and sensors, right up to the intangible level of artificial intelligence, including high-level perception, cognition and reasoning.

Prof. Robert Shepherd is the director of The Organic Robots Laboratory (ORL) at Cornell University that focuses on using organic chemistry of soft material composites for new capabilities in robots. He is focused on the material and mechanical design of soft machines. His work begins by identifying new material compositions for actuators, then mapping them onto a compatible mechanical system for motion. Due to the compliance of his soft material systems, the resulting machines are underactuated (e.g., they have more degrees of freedom than actuators) and much of their capabilities arise from this property. His interests lie in further developing the abilities of these soft machines.
 Dr. Hannah Stuart has been an Assistant Professor of Mechanical Engineering at the University of California Berkeley since January 2018, and is a faculty member of the Jacob’s Institute for Design Innovation. She received her BS in Mechanical Engineering from the George Washington University in 2011, then completed her MS and PhD in Mechanical Engineering from Stanford University in 2013 and 2017 respectively. Professor Stuart’s research interests include dexterous manipulation, robotics, bioinspired design and human haptics and she runs the Embodied Dexterity Group research lab (edg.berkeley.edu). She is a Hellman Faculty Fellow and recently received an Outstanding Service award from the IEEE Robotics and Automation Society.
Dr. Hannah Stuart has been an Assistant Professor of Mechanical Engineering at the University of California Berkeley since January 2018, and is a faculty member of the Jacob’s Institute for Design Innovation. She received her BS in Mechanical Engineering from the George Washington University in 2011, then completed her MS and PhD in Mechanical Engineering from Stanford University in 2013 and 2017 respectively. Professor Stuart’s research interests include dexterous manipulation, robotics, bioinspired design and human haptics and she runs the Embodied Dexterity Group research lab (edg.berkeley.edu). She is a Hellman Faculty Fellow and recently received an Outstanding Service award from the IEEE Robotics and Automation Society.
 Dr. Ryan L. Truby is a Postdoctoral Fellow at MIT’s Computer Science and Artificial Intelligence Lab working on the design, fabrication, and control of soft robots. He is currently developing new materials and manufacturing strategies for creating sensorized soft robots, as well as deep learning-based frameworks for their control. Before MIT, Ryan received his Ph.D. in Applied Physics from Harvard University, where he developed 3D printing strategies for fabricating novel soft robotic systems, such as the entirely soft, hardware-free Octobot he developed as part of a collaboration at Harvard’s Paulson School of Engineering and Applied Science and Wyss Institute. His research also includes work in 3D printed vascularized tissue constructs, soft electronics, artificial muscles, and architected materials. Ryan’s work at the materials-robotics interface has been supported by an NSF Graduate Research Fellowship and a Schmidt Science Fellowship, and he has received awards in both fields, including the Gold Award for Graduate Students from the Materials Research Society and the Outstanding Paper Award at the 2019 IEEE International Conference of Soft Robotics. Ryan is an Adjunct Assistant Professor of Materials Science and Engineering and Mechanical Engineering at Northwestern University, where he will begin as a tenure-track Assistant Professor and Core Member of Northwestern’s Center for Robotics and Biosystems next year.
Dr. Ryan L. Truby is a Postdoctoral Fellow at MIT’s Computer Science and Artificial Intelligence Lab working on the design, fabrication, and control of soft robots. He is currently developing new materials and manufacturing strategies for creating sensorized soft robots, as well as deep learning-based frameworks for their control. Before MIT, Ryan received his Ph.D. in Applied Physics from Harvard University, where he developed 3D printing strategies for fabricating novel soft robotic systems, such as the entirely soft, hardware-free Octobot he developed as part of a collaboration at Harvard’s Paulson School of Engineering and Applied Science and Wyss Institute. His research also includes work in 3D printed vascularized tissue constructs, soft electronics, artificial muscles, and architected materials. Ryan’s work at the materials-robotics interface has been supported by an NSF Graduate Research Fellowship and a Schmidt Science Fellowship, and he has received awards in both fields, including the Gold Award for Graduate Students from the Materials Research Society and the Outstanding Paper Award at the 2019 IEEE International Conference of Soft Robotics. Ryan is an Adjunct Assistant Professor of Materials Science and Engineering and Mechanical Engineering at Northwestern University, where he will begin as a tenure-track Assistant Professor and Core Member of Northwestern’s Center for Robotics and Biosystems next year.
 Prof. Bram Vanderborght is a professor at the VUB since 2009. Currently he coordinates EU FET SHERO SHERO project and Marie Curie ITN SMART project, he is VUB-PI of EU project SOPHIA, and he is the core lab manager of Flanders Make in Flexible Assembly and member of Brubotics . He is also the Editor In Chief of IEEE Robotics and Automation Magazine. His research interests include the use of soft and self healing actuators for cognitive and physical human robot interaction in applications in health and manufacturing. Our work is on display in the AI Experience Center .
Prof. Bram Vanderborght is a professor at the VUB since 2009. Currently he coordinates EU FET SHERO SHERO project and Marie Curie ITN SMART project, he is VUB-PI of EU project SOPHIA, and he is the core lab manager of Flanders Make in Flexible Assembly and member of Brubotics . He is also the Editor In Chief of IEEE Robotics and Automation Magazine. His research interests include the use of soft and self healing actuators for cognitive and physical human robot interaction in applications in health and manufacturing. Our work is on display in the AI Experience Center .
Moderator:
 Dr. Gina Olson earned her PhD in Robotics and Mechanical Engineering from Oregon State University, where she was advised by Dr. Yiğit Mengüç and Dr. Julie A. Adams. Her dissertation work focused on developing modeling techniques to aid in soft robot arm design. She is currently a postdoctoral researcher in the Soft Machines Lab at Carnegie Mellon University, where she is developing soft joints for deep sea diving suits, in order to maintain diver mobility. Her current research interests are developing novel soft robot structures, modeling the mechanics of soft robots and investigating soft-appropriate alternatives to traditional methods in path planning, control, sensing, etc. in order to build functional soft robots. Prior to coming to Oregon State, Dr. Olson worked as a Technical Lead Engineer at Meggitt Polymers and Composites, where she developed and qualified fire seals for aircraft engines. She earned her Master’s in Aeronautical Engineering at Caltech, and her Bachelor’s in Mechanical Engineering at Rose-Hulman Institute of Technology.
Dr. Gina Olson earned her PhD in Robotics and Mechanical Engineering from Oregon State University, where she was advised by Dr. Yiğit Mengüç and Dr. Julie A. Adams. Her dissertation work focused on developing modeling techniques to aid in soft robot arm design. She is currently a postdoctoral researcher in the Soft Machines Lab at Carnegie Mellon University, where she is developing soft joints for deep sea diving suits, in order to maintain diver mobility. Her current research interests are developing novel soft robot structures, modeling the mechanics of soft robots and investigating soft-appropriate alternatives to traditional methods in path planning, control, sensing, etc. in order to build functional soft robots. Prior to coming to Oregon State, Dr. Olson worked as a Technical Lead Engineer at Meggitt Polymers and Composites, where she developed and qualified fire seals for aircraft engines. She earned her Master’s in Aeronautical Engineering at Caltech, and her Bachelor’s in Mechanical Engineering at Rose-Hulman Institute of Technology.
Past Event:
”Morphological Contribution vs. Traditional Methods for Control and Planning in Soft Robotics”

When: Monday, July 13, 2020 2:00 pm Eastern Daylight Time (New York, GMT-04:00)
Where: IEEE Webex (no registration required)
Suggest us questions that you think may spark good debate around this topic: IEEE SmatSheet From
Panellists:
 Dr. Cosimo Della Santina is currently Assistant Professor at CoR, TU Delft. He received a PhD in robotics (cum laude, 2019), from University of Pisa, Italy. He was a Visiting PhD student and a postdoc (2017 to 2019) of the Computer Science and Artificial Intelligence Laboratory (CSAIL), Massachusetts Institute of Technology (MIT), Cambridge, MA, USA. From 2020, he is affiliated to the German Aerospace Centre (DLR) as external research scientist. For the first six months of the same year he also held a post doc position at the department of Mathematics and Informatics, Technical University of Munich (TUM), Germany. Cosimo has been awarded with EuRobotics Georges Giralt Ph.D. Award (2020), and the “Fabrizio Flacco” Young Author Award of the RAS Italian chapter (2019). He also has been a finalist of the European Embedded Control Institute PhD award (2019). His main research interests include (i) Modelling for Control and Model Based Control of Soft Robots, (ii) Combining Machine Learning and Model Based Strategies with application to soft robotics, (iii) Soft Robotic Hands.
Dr. Cosimo Della Santina is currently Assistant Professor at CoR, TU Delft. He received a PhD in robotics (cum laude, 2019), from University of Pisa, Italy. He was a Visiting PhD student and a postdoc (2017 to 2019) of the Computer Science and Artificial Intelligence Laboratory (CSAIL), Massachusetts Institute of Technology (MIT), Cambridge, MA, USA. From 2020, he is affiliated to the German Aerospace Centre (DLR) as external research scientist. For the first six months of the same year he also held a post doc position at the department of Mathematics and Informatics, Technical University of Munich (TUM), Germany. Cosimo has been awarded with EuRobotics Georges Giralt Ph.D. Award (2020), and the “Fabrizio Flacco” Young Author Award of the RAS Italian chapter (2019). He also has been a finalist of the European Embedded Control Institute PhD award (2019). His main research interests include (i) Modelling for Control and Model Based Control of Soft Robots, (ii) Combining Machine Learning and Model Based Strategies with application to soft robotics, (iii) Soft Robotic Hands.
 Dr. Manolo Garabini graduated in Mechanical Engineering and received the Ph.D. degree in Robotics from the University of Pisa where he is employed as Assistant Professor. His main research interests are in the design, planning and control of soft and adaptive robots, from single joints, to end-effectors (hands, grippers, feet), to complex multi-dof systems. A part of his activity has been devoted to theoretically demonstrate the effectiveness of soft and adaptive robots in high performance, high efficiency and resilient tasks via analytical and numerical optimization tools. He contributed to the realization of modular Variable Stiffness Actuators. He contributed in the design of the joints and the lower body of the humanoid robot WALK-MAN and participated at the DARPA Robotics Challenge and at a field test in Amatrice, Italy after a disastrous earthquake event. Recently he contributed to the development of an efficient and effective compliance planning algorithms for interaction under uncertainties. Currently he is the Principal Investigator in the THING H2020 EU Research Project for the University of Pisa.
Dr. Manolo Garabini graduated in Mechanical Engineering and received the Ph.D. degree in Robotics from the University of Pisa where he is employed as Assistant Professor. His main research interests are in the design, planning and control of soft and adaptive robots, from single joints, to end-effectors (hands, grippers, feet), to complex multi-dof systems. A part of his activity has been devoted to theoretically demonstrate the effectiveness of soft and adaptive robots in high performance, high efficiency and resilient tasks via analytical and numerical optimization tools. He contributed to the realization of modular Variable Stiffness Actuators. He contributed in the design of the joints and the lower body of the humanoid robot WALK-MAN and participated at the DARPA Robotics Challenge and at a field test in Amatrice, Italy after a disastrous earthquake event. Recently he contributed to the development of an efficient and effective compliance planning algorithms for interaction under uncertainties. Currently he is the Principal Investigator in the THING H2020 EU Research Project for the University of Pisa.
 Dr. Helmut Hauser is a Senior Lecturer (Associate Professor) in Robotics at the University of Bristol and the Bristol Robotics Laboratory. His research is focused on morphological computation and embodiment, especially in the context of soft robotics. He is interested in understanding the underlying principles of how complex physical properties of biological systems are exploited to facilitate learning and controlling tasks, and how these principles can be employed to design better robots. He has published his work in high-impact journals including Science Robotics, Nature Machine Intelligence, and Scientific Reports and he has won various awards at international conferences. He was the project manager of the EU project LOCOMORPH and he participated in a number of other projects like OCTOPUS, SMART-E and NCCR Robotics. He was co-organizer of the 2nd and 3rd international conference on morphological computation and he organized a number of workshops and special issues on the same topic. He is the editor of the e-book “Opinions and Outlooks on Morphological Computation”. He is currently leading the Leverhulme Trust Project “Computing with Spiders’ Webs” and the UKRI Strategic Research Group on Soft Robotics.
Dr. Helmut Hauser is a Senior Lecturer (Associate Professor) in Robotics at the University of Bristol and the Bristol Robotics Laboratory. His research is focused on morphological computation and embodiment, especially in the context of soft robotics. He is interested in understanding the underlying principles of how complex physical properties of biological systems are exploited to facilitate learning and controlling tasks, and how these principles can be employed to design better robots. He has published his work in high-impact journals including Science Robotics, Nature Machine Intelligence, and Scientific Reports and he has won various awards at international conferences. He was the project manager of the EU project LOCOMORPH and he participated in a number of other projects like OCTOPUS, SMART-E and NCCR Robotics. He was co-organizer of the 2nd and 3rd international conference on morphological computation and he organized a number of workshops and special issues on the same topic. He is the editor of the e-book “Opinions and Outlooks on Morphological Computation”. He is currently leading the Leverhulme Trust Project “Computing with Spiders’ Webs” and the UKRI Strategic Research Group on Soft Robotics.
 Dr. Barbara Mazzolai is Director of the Center for Micro-BioRobotics since February 16th, 2011, and she was Deputy Director for the Supervision and Organization of the IIT Centers Network from July 2012 to 2017. She has been member of panels of the European Commission within the Seventh Frame Program in the field of Robotics and ICT, and of the Portuguese Foundation for Science and Technology in the field of Environment and Health. She is member of the Editorial Board of Bioinspiration & Biomimetics, Soft Robotics, Biomimetics, Robotics & Automation Letters, and Associated Editor for Frontiers in Bionics and Biomimetics. Her current scientific activity focuses on bioinspired soft robotics, with a particular research interest in merging Biology and Engineering. She is author of more than 180 papers appeared in international journals, books, and conference proceedings.
Dr. Barbara Mazzolai is Director of the Center for Micro-BioRobotics since February 16th, 2011, and she was Deputy Director for the Supervision and Organization of the IIT Centers Network from July 2012 to 2017. She has been member of panels of the European Commission within the Seventh Frame Program in the field of Robotics and ICT, and of the Portuguese Foundation for Science and Technology in the field of Environment and Health. She is member of the Editorial Board of Bioinspiration & Biomimetics, Soft Robotics, Biomimetics, Robotics & Automation Letters, and Associated Editor for Frontiers in Bionics and Biomimetics. Her current scientific activity focuses on bioinspired soft robotics, with a particular research interest in merging Biology and Engineering. She is author of more than 180 papers appeared in international journals, books, and conference proceedings.
 Dr. Thrishantha Nanayakkara is a Reader (associate professor) in Design Engineering and Robotics at Dyson School of Design Engineering (DSDE), Imperial College London , where he is also the Director of the Morph Lab. He has published more than 140 papers in flagship robotics conferences and journals including IEEE transactions on robotics, IEEE Robotics and Automation Letters, RSS, IROS, ICRA, and RoboSoft. TN is in the the UK RAS Strategic Task Group for Soft Robotics, and in the editorial board as an Associate Editor of flagship robotics publications such as IEEE Robotics and Automation Letters (RAL), RSS, ICRA, IROS, RoboSoft, Frontiers in Soft Robotics, and the Journal of Robotics and Mechatronics. He has worked at leading laboratories for robotics and neuromotor control, including the Laboratory for Computational Motor Control, Johns Hopkins University, MIT Computer Science and Artificial Intelligence Lab (CSAIL), and Harvard Neuromotor Control Lab.
Dr. Thrishantha Nanayakkara is a Reader (associate professor) in Design Engineering and Robotics at Dyson School of Design Engineering (DSDE), Imperial College London , where he is also the Director of the Morph Lab. He has published more than 140 papers in flagship robotics conferences and journals including IEEE transactions on robotics, IEEE Robotics and Automation Letters, RSS, IROS, ICRA, and RoboSoft. TN is in the the UK RAS Strategic Task Group for Soft Robotics, and in the editorial board as an Associate Editor of flagship robotics publications such as IEEE Robotics and Automation Letters (RAL), RSS, ICRA, IROS, RoboSoft, Frontiers in Soft Robotics, and the Journal of Robotics and Mechatronics. He has worked at leading laboratories for robotics and neuromotor control, including the Laboratory for Computational Motor Control, Johns Hopkins University, MIT Computer Science and Artificial Intelligence Lab (CSAIL), and Harvard Neuromotor Control Lab.
Moderator:
 Dr. Laura Blumenschein is an Assistant Professor of Mechanical Engineering at Purdue University. She received her PhD in Mechanical Engineering from Stanford in 2019 under the supervision of Professor Allison Okamura. Her research focuses on soft robots inspired by plants, which grow in order to explore their environments and build structures.
Dr. Laura Blumenschein is an Assistant Professor of Mechanical Engineering at Purdue University. She received her PhD in Mechanical Engineering from Stanford in 2019 under the supervision of Professor Allison Okamura. Her research focuses on soft robots inspired by plants, which grow in order to explore their environments and build structures.